Proj-2013-2014-Python-STM32F4
Jump to navigation
Jump to search
Introduction
Team
- Tutors : Olivier Richard
- Members : TAO Xinxiu , XIA Ye
Objectives
Software Requirements Specification (SRS)
The SRS document:
Points à traiter
- Modidification des Makefile
utilisation de arm-none-eabi-g++ et des bonnes options https://launchpad.net/gcc-arm-embedded
- support STL
Voir https://github.com/andysworkshop/stm32plus à voir aussi uSTL http://msharov.github.io/ustl/
- Lib C
Voir newlib et newlib-nano https://launchpad.net/gcc-arm-embedded
from gcc-arm-embedded source https://launchpadlibrarian.net/160487135/readme.txt * C Libraries usage * This toolchain is released with two prebuilt C libraries based on newlib: one is the standard newlib and the other is newlib-nano for code size. To distinguish them, we rename the size optimized libraries as: libc.a --> libc_s.a libg.a --> libg_s.a To use newlib-nano, users should provide additional gcc link time option: --specs=nano.specs Nano.specs also handles two additional gcc libraries: libstdc++_s.a and libsupc++_s.a, which are optimized for code size. For example: $ arm-none-eabi-gcc src.c --specs=nano.specs $(OTHER_OPTIONS) This option can also work together with other specs options like --specs=rdimon.specs Please be noticed that --specs=nano.specs is a linker option. Be sure to include in linker option if compiling and linking are separated. ** additional newlib-nano libraries usage Newlib-nano is different from newlib in addition to the libraries' name. Formatted input/output of floating-point number are implemented as weak symbol. If you want to use %f, you have to pull in the symbol by explicitly specifying "-u" command option. -u _scanf_float -u _printf_float e.g. to output a float, the command line is like: $ arm-none-eabi-gcc --specs=nano.specs -u _printf_float $(OTHER_LINK_OPTIONS) For more about the difference and usage, please refer the README.nano in the source package.
- Garbage Collection
Voir tinygc http://tinygc.sourceforge.net/ à voir aussi celui de micropython
- libprce
Voir T-Rex is a minimalistic regular expression http://tiny-rex.sourceforge.net/ http://sourceforge.net/projects/tiny-rex/
Progress
project start : 13/01/2014
Week 1 (13/01 - 19/01)
- Project discovery
- Research of related projects
Week 2 (20/01 - 26/01)
- STM32 develop environment
Add USB device
Create a new udev rule in /etc/udev/rules.d/45-usb-stlink-v2.rules:
SUBSYSTEM=="usb", ATTR{idVendor}=="0483", ATTR{idProduct}=="3748", MODE="660", GROUP="plugdev"
To reboot :
$ sudo service udev restart
Download the GNU/ARM toolchain
Download the Linux current installation tarball from
https://launchpad.net/gcc-arm-embedded/+download
$ tar -xvjf gcc-arm-none-eabi-xxxxxxxxxxxxxxxxxx-linux.tar.bz2
Add the fallowing to your ~/.bashrc
export PATH=$PATH:~/xxxxxxx/gcc-arm-none-eabi-xxxxxxxxx/bin
$ source ~/.bashrc
To check :
$ arm-none-eabi-gcc --version
If you get an error message “bash : ... file does not exist”.
Maybe it is caused by the difference between 32bit and 64bit system. Try :
$ sudo apt-get install ia32-libs*
Download and Build STLINK
STLINK is for programming and debugging firmware.
you'll first need to install a couple of packages:
$ sudo apt-get install autoconf pkg-config libusb-1.0 git
Retrieve a copy of the STLINK source:
$ git clone https://github.com/texane/stlink.git
Build the code following the instructions in the README, with:
$ ./autogen.sh
$ ./configure
$ make
As a sanity check, look in ~/st-link and you should see st-util, st-flash, etc...
You may check if the board could be connected by execute st-util.
If it does not work please confirm if the rule you added in the first step corresponds your system.
Refer to link : http://www.wolinlabs.com/blog/linux.stm32.discovery.gcc.html
- Try the official examples of ST on the cards
To avoid using the commercial software IDE and understand better, We decided to develop on Linux for this project. During the tries, for certain examples, we've got different results on STM32F407 and STM32F401. We choose STM32F407 as the hardware for the following developement.
Week 3 (27/01 - 02/02)
- Test Project MicroPython
- Test Project Shedskin
- STM32 hardware


Week 4 (02/02 - 09/02)
- STM32 breakdown situation & solution
Cause Reason After RCC->AHB1ENR |= RCC_AHB1ENR_GPIOCEN; GPIOC->MODER = 0x04000000; GPIOC->ODR ^= (1 << 13); is used (compiled and burned successfully) Status 1) $st-flash write timer_gpio_out.bin 0x8000000 2012-02-09T23:25:54 INFO src/stlink-common.c: Loading device parameters.... 2012-02-09T23:25:54 WARN src/stlink-common.c: unknown chip id! 0 stlink_sram_flash() == -1 make: *** [write] Error 255 2) hold the Reset button while: $./st-util 2012-02-25T16:00:42 INFO src/stlink-common.c: Loading device parameters.... 2012-02-25T16:00:42 WARN src/stlink-common.c: unknown chip id! 0xe0042000 2012-02-25T16:00:42 INFO src/stlink-sg.c: Successfully opened a stlink v1 debugger Chip ID is 00000000, Core ID is 00000000. KARL - should read back as 0x03, not 60 02 00 00 init watchpoints Listening at *:4242... 3) $st-flash erase 2012-02-09T23:28:01 INFO src/stlink-common.c: Loading device parameters.... 2012-02-09T23:28:01 WARN src/stlink-common.c: unknown chip id! 0xe0042000 Mass erasing 4) If I hold the Reset button while erasing: ahl@ubuntu:~/Desktop/3/stlink/example/32l_lcd$ ../../flash/flash erase 2012-02-09T23:28:28 INFO src/stlink-common.c: Loading device parameters.... 2012-02-09T23:28:28 INFO src/stlink-common.c: Device connected is: L1 Med-density device, id 0x10386416 2012-02-09T23:28:28 INFO src/stlink-common.c: SRAM size: 0x4000 bytes (16 KiB), Flash: 0 bytes (0 KiB) in pages of 256 bytes Mass erasing 5) If I hold the Reset button while flashing: dahl@ubuntu:~/Desktop/3/stlink/example/32l_lcd$ make write ../../flash/flash write lcd.bin 0x08000000 2012-02-10T14:13:21 INFO src/stlink-common.c: Loading device parameters.... 2012-02-10T14:13:21 INFO src/stlink-common.c: Device connected is: L1 Med-density device, id 0x10386416 2012-02-10T14:13:21 INFO src/stlink-common.c: SRAM size: 0x4000 bytes (16 KiB), Flash: 0x20000 bytes (128 KiB) in pages of 256 bytes 2012-02-10T14:13:21 INFO src/stlink-common.c: Attempting to write 7332 (0x1ca4) bytes to stm32 address: 134217728 (0x8000000) 2012-02-10T14:13:21 WARN src/stlink-common.c: pecr.pelock not clear (0x7) 2012-02-10T14:13:21 WARN src/stlink-common.c: Failed to erase_flash_page(0x8000000) == -1 stlink_fwrite_flash() == -1 make: *** [write] Error 255 Solution 1) hold the Reset button while: $ st-util 2013-03-23T15:51:17 INFO src/stlink-common.c: Loading device parameters.... 2013-03-23T15:51:17 INFO src/stlink-common.c: Device connected is: F1 Medium-density device, id 0x20036410 2013-03-23T15:51:17 INFO src/stlink-common.c: SRAM size: 0x5000 bytes (20 KiB), Flash: 0x20000 bytes (128 KiB) in pages of 1024 bytes Chip ID is 00000410, Core ID is 1ba01477. KARL - should read back as 0x03, not 60 02 00 00 init watchpoints Listening at *:4242... 2) Next you will need to launch gdb (in a new terminal) from the tools directory and make use of the compiled binary that you pulled created earlier during the "make all". $ tools/arm-2011.03/bin/arm-none-eabi-gdb -q build/fw_coptercontrol/fw_coptercontrol.elf Reading symbols from /home/xxx/OpenPilot/build/fw_coptercontrol/fw_coptercontrol.elf...done. (gdb) target remote localhost:4242 Remote debugging using localhost:4242 0x0800010c in ?? () (gdb) bt #0 0x0800010c in ?? () #1 0xffffffff in ?? () Backtrace stopped: frame did not save the PC (gdb) i r r0 0x0 0 r1 0xa5a5a5a5 2779096485 r2 0x0 0 r3 0x200002d4 536871636 r4 0x20000cd0 536874192 r5 0xa5a5a5a5 2779096485 r6 0xa5a5a5a5 2779096485 r7 0xa5a5a5a5 2779096485 r8 0xa5a5a5a5 2779096485 r9 0xa5a5a5a5 2779096485 r10 0xa5a5a5a5 2779096485 r11 0xa5a5a5a5 2779096485 r12 0xa5a5a5a5 2779096485 sp 0x20000938 0x20000938 lr 0xffffffff 4294967295 pc 0x800010c 0x800010c fps 0xaddeadde 2917051870 cpsr 0x1000000 16777216 (gdb) c Continuing. Hit CTRL+C to test breakpoints and use l to see line numbers (gdb) c Continuing. ^C Program received signal SIGTRAP, Trace/breakpoint trap. 0x080039a0 in nmeaProcessGPRMC (GpsData=0xa5a5a5a5, gpsDataUpdated=<value optimized out>, param=0x20000cd0, nbParam=<value optimized out>) at ../Modules/GPS/NMEA.c:559 559 GpsData->Heading = NMEA_real_to_float(param[8]); (gdb) l I quitted the gdb when i found that the board worked again. Again you can easily verify the firmware. There are some situations solved by erasing or flashing while holding the reset button(black), but it does not work in our issue. Refer to link : http://forums.openpilot.org/topic/20173-regrouping-on-various-stm32f4discovery-swd-debugging-for-oplink-revo-cc3d/
- Test of STM32 printf
Refer to link : http://vedder.se/2012/07/usb-serial-on-stm32f4/ We have tried the program for the STM32F4 Discovery that uses the USB-CDC class to show up as an virtual serial port. It has routed the write system call to use this port, so the stdio printf function will print directly to this serial port. After have uploaded the program to the STM32F4 discovery and plug in a micro-USB cable to the port next to the audio jack. The serial port should show up as /dev/ttyACM0 on most GNU/Linux distributions, such as Ubuntu. Start a serial port terminal, such as gtkterm (sudo apt-get install gtkterm on Debian/Ubuntu), and open ttyACM0. As the following shot-screen :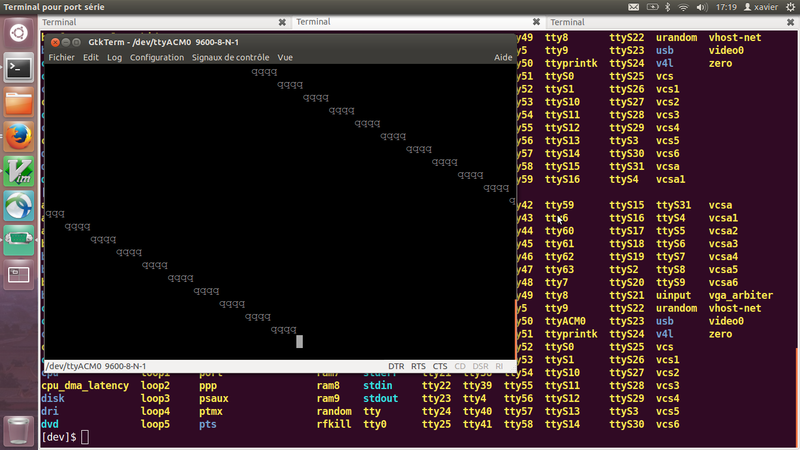

Week 5 (10/02 - 17/02)
- SRS document Proj-2013-2014-Python-STM32F4:SRS
- build and learn Project STM32Plus
Week 6-8 (17/02 - 10/03)
- The first version of the program
We have finished the first version of the program. In order to trait the text easier, we have made the choice of using TCL script language. The file structrue of the project is shown as bellow:
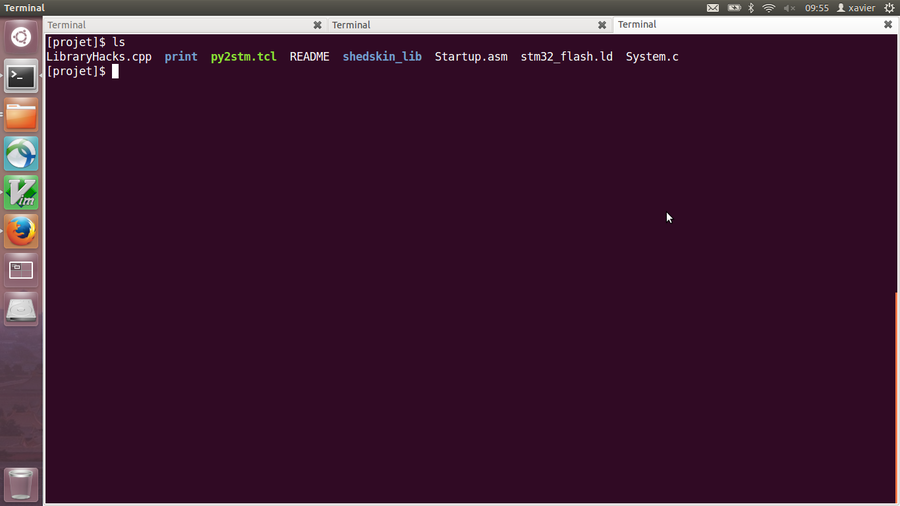 py2stm.tcl : executable file, the main program of the project;
print : directory, the library and .o files corresponding to realise printf function;
shedskin_lib : directory, the modified library of shedskin;
defaut : necessary files for compiling and executing on STM (link file, the file who realise the functions of low level, etc)
Needed Library & Program : STM32Plus, Arm-gcc, STLink. These paths are all defined at the beginning of the file py2stm.tcl.
With the help of this program, from a python source code, we could translate, generate project,
and download the compiled project to the card only with one command.
py2stm.tcl : executable file, the main program of the project;
print : directory, the library and .o files corresponding to realise printf function;
shedskin_lib : directory, the modified library of shedskin;
defaut : necessary files for compiling and executing on STM (link file, the file who realise the functions of low level, etc)
Needed Library & Program : STM32Plus, Arm-gcc, STLink. These paths are all defined at the beginning of the file py2stm.tcl.
With the help of this program, from a python source code, we could translate, generate project,
and download the compiled project to the card only with one command.

The program work flow is shown as the following:
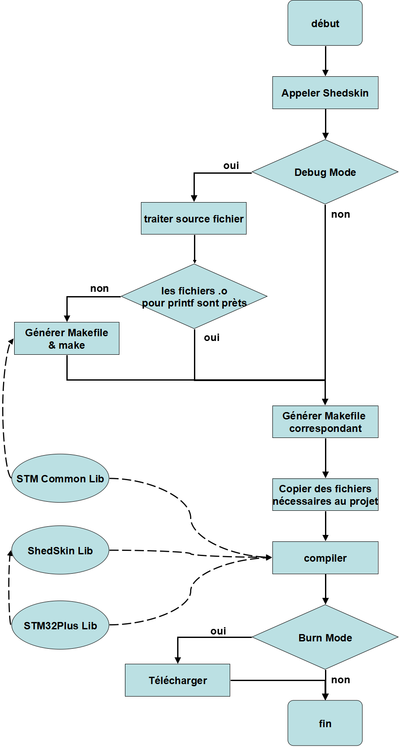 To support arm-g++ compiling, we have modified the library of shedskin. We have deleted the corresponding code of GC and PCRE.
Instead of using GC, we have included the library of STM32Plus to support the fonctions of malloc, std::string, etc.
To support arm-g++ compiling, we have modified the library of shedskin. We have deleted the corresponding code of GC and PCRE.
Instead of using GC, we have included the library of STM32Plus to support the fonctions of malloc, std::string, etc.

The usage of the program is shown bellow:
an example:
In the make file, we will compile the corresponding files of ShedSkin library, the needed low level functions, and link the stm32plus library. When we choose Deubg Mode, we will also need to link the STM Common library. With the option -b, the compiled program for stm will be burned to the card when finishing compile.
When there's a error (the python file doesn't existe)
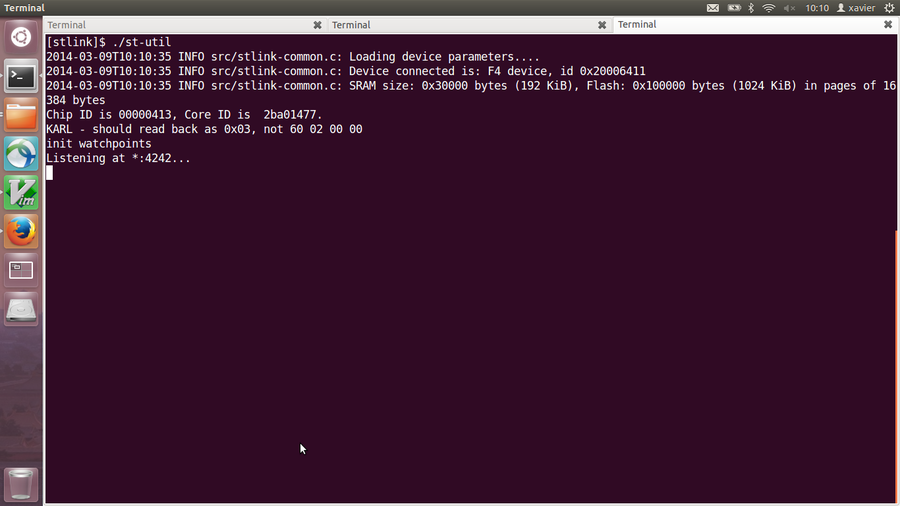
With the option -d, the function printf will be supported in the generated project. We have defined some low level functions in the file print/syscall.c to support printf, and we have done an redirection of the USB. The content of the printf will be sent to the USB, so users could use gtkterm to open the port ttyACM0 to have look at it and debug. The device will be found after the burn as following:
With the help of gtkterm ( or other visual tools ), we could choose the port ttyACM0, and see the content of the printf:
To support the fonction printf, we have used arm-gcc and arm-g++ in the same time. The reason is that, most of the examples of STM32 are in C ( STM official examples included ), In this project, the code translated by shedskin is in CPP, so we have to face up to the difficulty of using arm-gcc and arm-g++. We have used extern "C" {...} to compile the printf corresponding CPP code. If not, the linker will not be able the find the reference of the calling of C functions. For this function, during the executing of the program, we will not copy the source code of the printf to the generated project, we compile the printf corresponding fonctions only once, the .o files will be in the directory of py2stm/print. We think these functions are diffrent to the copied low level functions, they are not part of the genereated project, so we compile only once and we reuse them when linking.






For the reason of the redirection of USB, every time after we download the program to the card,
we could not download normally for another time. In this case, we could run stlink/st-util when
clicking the reset button of the card, then we will be able to download again.

Week 9-11 (10/03 - 31/03)
Week 12 (31/03 - 07/04)
Report Writing